İnce Satırlar
İnce Satırlar Liste Modu
Liste Modu Döşeme Modu
Döşeme Modu Sade Döşeme Modu
Sade Döşeme Modu Blog Modu
Blog Modu Hibrit Modu
Hibrit Modu

Massachusetts Teknoloji Enstitüsü (MIT), yeni geliştirdiği ve haritaya gerek duymadan çalışan sürücüsüz otomobil teknolojisini duyurdu. Bu gelişme, diğer şirketlerin navigasyon ve gelişmiş haritalar gibi sistemlerle geliştirdikleri sürücüsüz otomobil teknolojisini daha da ileri bir seviyeye taşıyacak.
Şimdiye kadar gerçek yollarda test halinde gördüğümüz sürücüsüz otomobiller, ne yapması gerektiğini bildirecek son derece ayrıntılı 3 boyutlu haritalar ve şerit işaretleri yardımı ile çalışıyor. Ancak MIT'nin teknolojisi, haritalandırılmamış ve yeterli şerit işaretleri olmayan yollarda bile çalışabilme özelliğine sahip. Enstitünün Bilgisayar Bilimi ve Yapay Zeka Laboratuvarı'nda (CSAIL) çalışan bir ekip, otonom araçların Gigabyte'larca 3 boyutlu haritalara gerek duymadan sadece GPS sinyalleri ve çevre okuması ile çalışan bir sürücüsüz otomobil teknolojisi geliştirdiler.
Sistem ilk testinden başarıyla geçti
MapLite adı verilen bu teknoloji, yol koşullarını izleyen LIDAR ve IMU sensörleri ile OpenStreetMap'in sadece en temel topografik haritalarını GPS kullanarak birleştiriyor. CSAIL yüksek lisans öğrencisi Teddy Ort "Bu tür haritasız bir teknolojinin daha önce yapılamamasının nedeni, detaylı 3D haritalarda olduğu gibi aynı doğruluk ve güvenilirliğe ulaşmanın zor olması. Sadece yerleşik sensörlerle çalışan böylesi bir sistem kendi kendini süren araçları, teknoloji şirketlerinin gelişmiş olarak haritaladığı kısıtlı bölgeden kurtarıyor." ifadelerini kullandı.
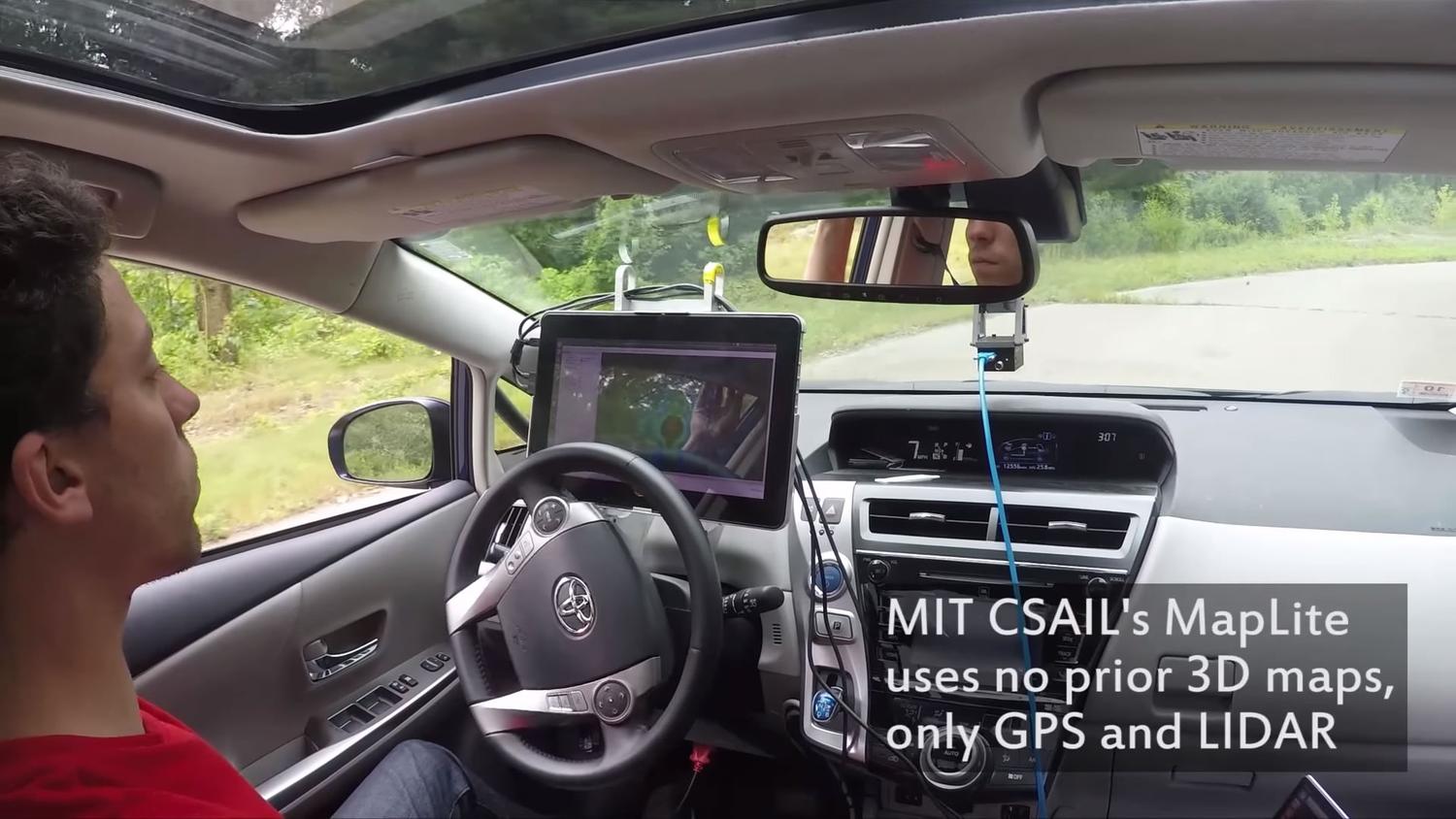
Sistemi test etmek için LIDAR, sensörler ve MapLite ile çalışan bir Toyota Prius kullanıldı. Sürücüsüz Prius saatte 30 km/s hızla, Devens ve Massachusetts'teki çok sayıda asfaltsız kırsal yolu başarıyla geçerek sistemin ilk testi vermesini sağladı. Geliştiriciler çeşitli modelleme sistemleri kullanarak kavşaklarda kaç tane yolun birleştiği gibi detayları da sisteme aktarabileceklerini belirtiyorlar.
MapLite gibi sistemler sürücüsüz otomobil teknolojisine birçok yenilik getirebilir ancak sistemin kusursuz çalışabilmesinin önünde uzun yıllar olduğu ise bir gerçek. MIT araştırmacıları trafiğin çok komplike olduğunu ve sistemin her türlü aksiyon ve değişikliği hesaba katması gerektiği yönünde fikir belirtiyorlar. Teddy Ort ise konuyla ilgili olarak: "Geleceğin sürücüsüz otomobillerinin her zaman kentsel alanlarda 3D haritaları kullanabileceğini düşünüyorum. Ama harita ve işaretçilerin kısıtlı olduğu yollarda ise bizim teknolojimizin bir adım önde olduğunu söyleyebilirim." şeklinde görüş belirtti.
Bu haberi, mobil uygulamamızı kullanarak indirip,istediğiniz zaman (çevrim dışı bile) okuyabilirsiniz: