 İnce Satırlar
İnce Satırlar Liste Modu
Liste Modu Döşeme Modu
Döşeme Modu Sade Döşeme Modu
Sade Döşeme Modu Blog Modu
Blog Modu Hibrit Modu
Hibrit Modu
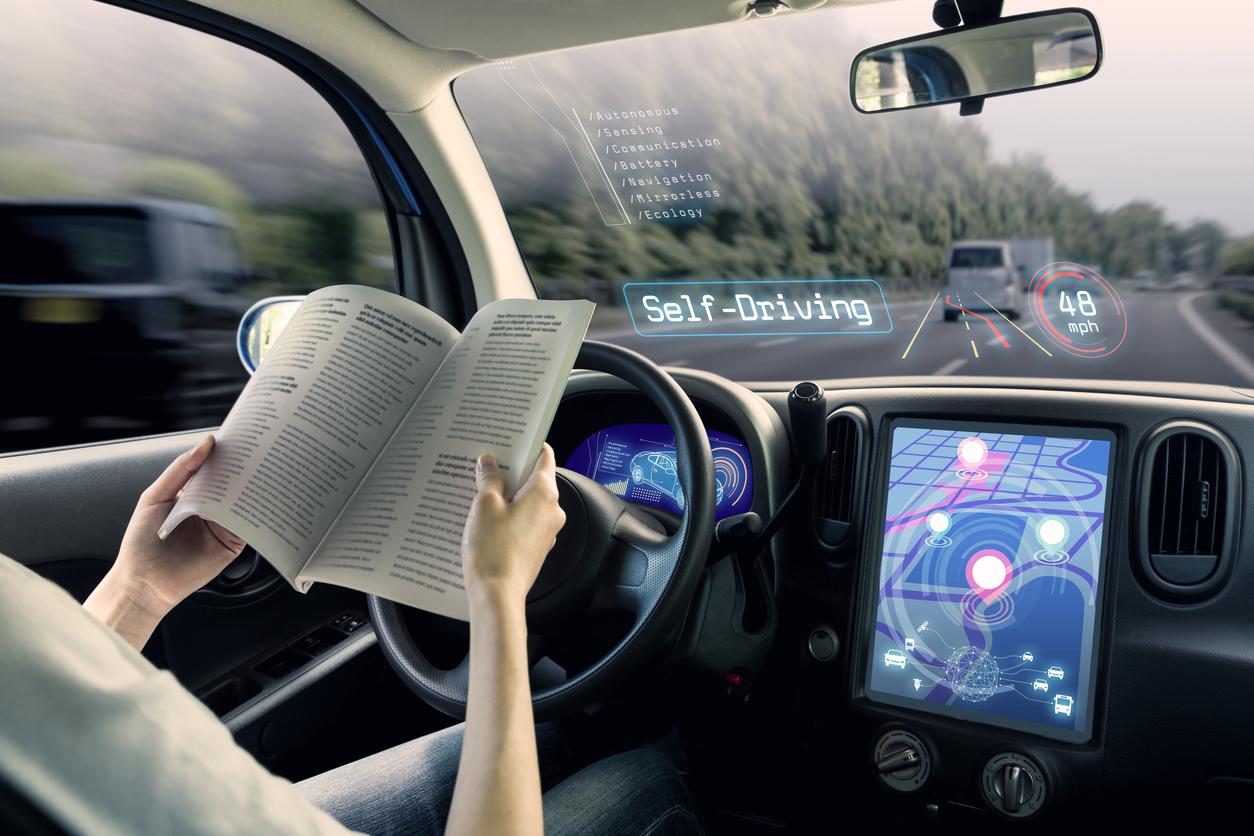
MIT araştırmacıları sürücüsüz araçlar için yeni bir algoritma geliştirdi çünkü şuan kullanılmakta olan şerit değiştirme algoritmalarının yetersiz olduğunu düşünüyorlar. MIT’ye göre çok detaylı istatistiklere dayanan bu algoritma modelleri karmaşık yapısı nedeniyle araçların anında karar vermesini zorlaştırıyor. Bazı algoritmalar ise aracı çok kısıtlı hareket etmeye – şerit değiştirmekten kaçınacak kadar - zorluyor.

Araçlar daha hızlı kara verebilecek
MIT tarafından geliştirilen yeni algoritma ise bu noktada sürücüsüz araçların trafikte daha atik davranabilmesini hedefliyor. Araştırmacılar tarafından belirtilene göre, şimdiki algoritmalara kıyasla çok daha az bilgi kullanacak bu model sayesinde araçlar çok daha hızlı karar alıp uygulamaya koyabilecek. Böylece nüfusun yoğun olduğu şehirlerdeki yoğun trafikle daha kolay başa çıkabilecek.
Yeni algoritma, sürücüsüz araç geliştirmede kullanılan “tampon bölgeler” konseptinin modifiye edilmiş bir versiyonuna dayanıyor. Bu konseptteki söz konusu bölgeler herhangi bir kazadan kaçınmak için sürücüsüz aracın kullanabileceği boşluk miktarını temsil ediyor. MIT’nin belirttiğine göre araçların çoğu bu tampon bölgeleri zamandan tasarruf etmek için önceden hesaplıyor. Ancak bu hesaplamalar önceden yapılmasına rağmen hızlı akan trafikte çok fazla zaman alıyor.
Projenin arkasında Toyota da var
MIT’nin “matematiksel olarak verimli” adını verdiği model ise daha az denklem içeriyor. Bu da hem sürücüsüz araçların sürekli ve hızlı bir şekilde tampon bölge oluşturmasına hem de geliştiricilerin bu araçlara daha geniş yelpazede sürüş stili eklemesine imkan veriyor. MIT, yapılan simülasyon testlerinin başarıyla sonuçlandığını fakat gerçek koşullardaki testlere henüz başlamadıklarını belirtti. Toyota gibi üreticiler tarafından desteklenen bu çalışmayı sürücüsüz araçlarda görmek çok uzun sürmeyecektir.
Bu haberi ve diğer DH içeriklerini, gelişmiş mobil uygulamamızı kullanarak görüntüleyin:








20 sene önce yerli ve milli tüfek bile üretemeyen ülkeden bugün dünyanın konuştuğu savunma sanayi projelerini gerçekleştiren ülkeye. Hamdolsun.